软件功能说明
上位机PC作为主控,其软件功能包括机器人建模、相控阵检测参数设置、同步模块触发检测设置、机器人手眼标定、机器人位置回零、曲面工件外形轮廓测量、检测路径规划、TFTP传输轨迹文件,具体如下:
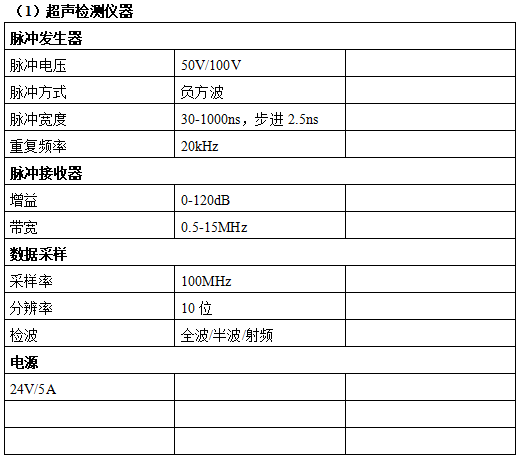
(1)超声检测参数设置
通过上位机检测软件设置超声仪器检测工艺参数,包括:声速、检测范围、增益、检测方式等。
(2)同步模块检测参数设置
根据相应的检测工艺需求设置同步模块参数,包括触发间隔等。
(3)机器人建模
根据所选用的机器人型号,上位机检测软件完成机器人DH参数建模。
(4)手眼标定
手眼标定采用“眼在手上”,确定相机坐标系和机器人坐标系之间的变换矩阵。
(5)机器人位置清零
机器人经过长途运输或产生较大运行误差时,将各轴回至初始位置并清零。
(6)曲面工件外形轮廓测量
在曲面工件CAD图已知且工件加工误差较小时,以CAD图规划检测路径;当曲面工件CAD图未知或工件加工误差加大时,采用视觉多角度测量工件外形轮廓并拼接多角度测量结果,最终得到完成的曲面工件模型。
(7)检测路径规划
规划检测路径分两种,基于CAD图的检测路径规划和基于视觉图像的路径规划。
(8)TFTP轨迹文件传输
通过TFTP协议,上位机将轨迹规划文件从上位机源位置发送至控制器目标位置。



 鄂公网安备 42018502006815号
鄂公网安备 42018502006815号